功率200-1500W
负载0-10T
定制可以非标定制
电压直流48V或者24V
速度任意设置
在开始熟悉使用AGV小车之前,请牢记以下几条注意事项:
1、启动AGV小车之前,请注意小车是否处于导引线中间。如果位置不正确,请 关闭小车电源后 将小车推到导引线中间后再启动小车。小车分车头和车尾,装有液晶屏的为车头,另一侧为车尾,小车启动必须保证车头车尾线,即导引线在车头车尾的中间,左右偏差可以在正负10CM,小车启动后会自动调整车头车尾,使之在位置。
2、启动AGV小车之前,请查看小车*的红色紧停按钮是否按下。如果处于紧停状态,请旋转紧停按钮使之弹出。
3、旋转车顶的钥匙,启动小车电源。如果听到:“滴”一声短音,并且液晶显示屏上出现蓝色欢迎界面,表示小车启动成功。如果听到:“滴——”的长音,表示小车启动未正常,请旋转钥匙回原位,关闭小车电源后稍等5秒重新启动小车,直到启动成功为止。如果连续3次以上启动未成功,请尽快给小车充电。
4、AGV小车启动正常后,两个的停车灯短暂亮3秒后熄灭,液晶屏上出现蓝色欢迎界面,小车进入内部系统自检过程。短暂自检后,小车进入正常运行状态,等待操作人员进行下一步操作。
5、AGV小车内部铅酸蓄电池能支持连续工作6个小时,如果正常运行中经常发生读地址卡不成功,或小车从停止状态启动不成功,请尽快给小车充电,充电时间请保证8个小时。
6、AGV小车充电时,需要将紧停按钮拍下,将钥匙开关逆时针旋转关闭小车电源。将充电器电源插头接通电源,充电器充电插头插入小车尾部的充电插座,开启充电器电源。小车顶部绿色充电灯亮,表示充电过程正常。察看充电器上各旋钮状态,充电电压必须选择24V档,充电电流顺时针旋转到位置。充电8小时以后,请查看充电器上的电流表指针读数,当指针读数小于1A时,代表充电过程接近结束,可以将充电器拔下。
7、AGV小车运行时,出现异常情况小车出轨后,请手动按下“取消”键紧急停车或按下紧停按钮关闭小车电源。在关闭小车电源后将小车推回导引轨道重新运行。小车内部提供出轨保护电路,当小车离开轨道运行2秒后,自动停止运行,同样需要关闭小车电源后,将小车推回轨道运行。
8、由于场地有限,地图复杂,小车的速度尽量为1档或2档 。当AGV小车在转弯运行时,请保证速度为1档;当小车在停车之前和从停车状态启动时,速度也必须为1档。直线运行时,可以选择2档,尽量不要使用3档和4档。
9、路径输入表多支持27条路径,在小车屏幕上输入路径时,可通过PAGE UP 和 PAGE DOWN 按钮翻页。在屏幕*会出现当前页号。
AGV小车可以选择由计算机远程设置或者小车手动设置。

AGV从发明至今已经有60年的历史,随着应用领域的扩展,其种类和形式变得多种多样。常常根据AGV自动行驶过程中的导航方式将AGV分为以下几种类型:
1.电磁感应引导式AGV
电磁感应式引导一般是在地面上,沿预先设定的行驶路径埋设电线,当高频电流流经导线时,导线周围产生电磁场,AGV上左右对称安装有两个电磁感应器,它们所接收的电磁信号的强度差异可以反映AGV偏离路径的程度。AGV的自动控制系统根据这种偏差来控制车辆的转向,连续的动态闭环控制能够保证AGV对设定路径的稳定自动跟踪。这种电磁感应引导式导航方法在绝大多数商业化的AGVS上使用,尤其是适用于大中型的AGV。
2.激光引导式AGV
该种AGV上安装有可旋转的激光扫描器,在运行路径沿途的墙壁或支柱上安装有高反光性反射板的激光定位标志,AGV依靠激光扫描器发射激光束,然后接受由四周定位标志反射回的激光束,车载计算机计算出车辆当前的位置以及运动的方向,通过和内置的数字地图进行对比来校正方位,从而实现自动搬运。
该种AGV的应用越来越普遍。并且依据同样的引导原理,若将激光扫描器更换为红外发射器、或超声波发射器,则激光引导式AGV可以变为红外引导式AGV和超声波引导式AGV。
3. 视觉引导式AGV
视觉引导式AGV是正在快速发展和成熟的AGV,该种AGV上装有CCD摄像机和传感器,在车载计算机中设置有AGV欲行驶路径周围环境图像数据库。AGV行驶过程中,摄像机动态获取车辆周围环境图像信息并与图像数据库进行比较,从而确定当前位置并对下一步行驶做出决策。
这种AGV由于不要求人为设置任何物理路径,因此在理论上具有的引导柔性,随着计算机图像采集、储存和处理技术的飞速发展,该种AGV的实用性越来越强。
此外,还有铁磁陀螺惯性引导式AGV、光学引导式AGV等多种形式的AGV。

agv小车指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源,一般可通过电脑来控制其行进路线以及行为。
agv小车底部通过驱动轮控制agv小车的移动,现有的agv小车驱动轮通过螺栓与agv小车底板进行锁固,但未对驱动轮的平行效果进行保证,容易导致前后两侧的驱动轮产生平行偏差,影响agv小车驱动轮的驱动轨迹。
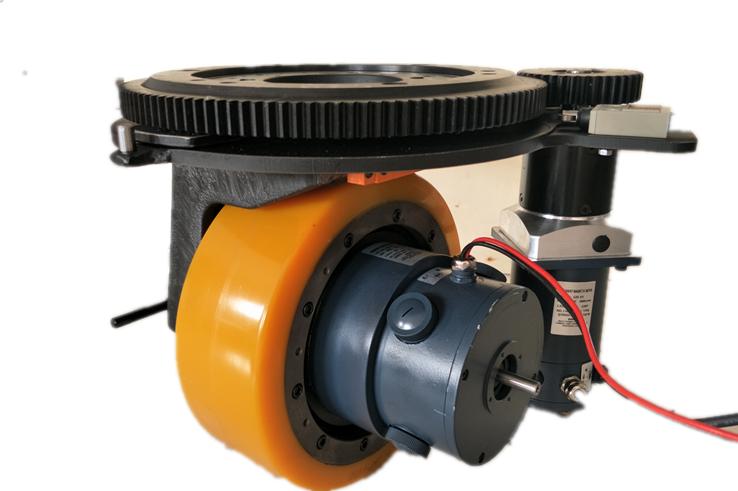
差动轮AGV
优点:差动轮AGV通过两轮的差动来实现转向,转向时的半径,速度,角速度,都由两个差动轮来确定。可以实现原地打转等动作,有比较强的灵活性。差动轮AGV对电机和控制精度要求不高,因而成本低廉。
缺点:差动轮AGV运行精度较低,无法适应对精度要求高的场合。
AGV主要的导引方式:电磁感应导引,光带导引,激光导引引,视觉导引,超声波导引,GPS导引等。AGV的运载方式可以根据需求进行定制,并没有固定的形式,因而灵活多变。但按照大类区分,主要可以分为以下几类:背驮式,潜伏式,叉车式等等
http://a2794852653.cn.b2b168.com







