功率200-1500W
负载0-10T
定制可以非标定制
电压直流48V或者24V
速度任意设置
1)自动化程度高
由计算机,电控设备,磁气感应SENSOR,激光反射板等控制。
当车间某一环节需要辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到控制室,由的技术人员向计算机发出指令,在电控设备的合作下,这一指令终被AGV接受并执行——将辅料送至相应地点。
(2)充电自动化
当AGV小车的电量即将耗尽时,它会向系统发出请求指令,请求充电(一般技术人员会事先设置好一个值),在系统允许后自动到充电的地方“排队”充电。
另外,AGV小车的电池寿命很长(2年以上),并且每充电15分钟可工作4h左右。
(3)提高企业形象
AGV美观,可观赏度高,从而提高企业的形象。
(4)方便,减少占地面积
生产车间的AGV小车可以在各个车间穿梭往复。

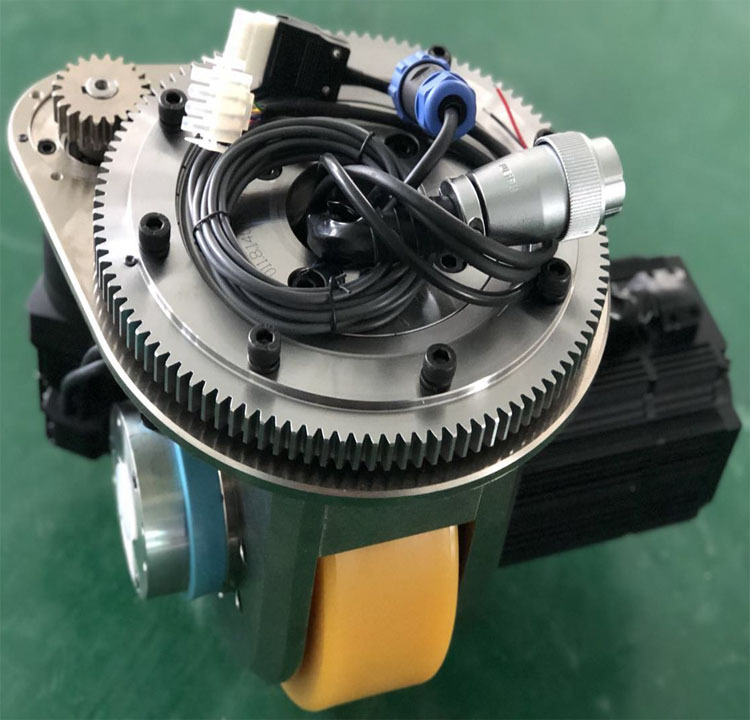
AGV常用的车能主要有以下几种:
驱动轮 :车轮安装一个牵引电机,只驱动车轮前进或后退,但可以使驱动轮成组使 用,组成双轮差速驱动系统。
转向轮: 安装一个转向电机,只可以使轮子绕其中心作旋转运动,并无前进动力,不能驱动车体前进。
万向轮: 又称活动脚轮,可进行万向旋转,一般固定车体底盘下,起支撑作用。
定向轮: 即固定轮,只有一个自由度,安装车体下用于导引车体运动,保证车体行进过程中的稳定性。
目前使用较为广泛的 车轮包括球轮、正交轮、偏心轮、Mutual YoYo轮、Mecanum轮、轮毂电机和舵轮,它们的结构决定了它们的运动方式和使用场合。

AGV属于轮式移动机器人,按照移动特性又可将移动机器人分为两种: 非移动机器人和移动机器人。物体在平面上的移动可产生前后,左右和自转3个自由度的运动。若所具有的自由度少于3个则为非移动机器人;若具有完全的3个自由度,则称为移动机器人。

1.电磁感应引导 利用低频引导电缆形成的电磁场及电磁传感装置引导无人搬运车的运行。
2.激光引导 利用激光扫描器识别设置在其活动范围内的若干个定位标志来确定其坐标位置,从而引导AGV运行。
3.磁铁--陀螺引导 利用特制磁性位置传感器检测安装在地面上的小磁铁,再利用陀螺仪技术连续控制无人搬运车的运行方向。
http://a2794852653.cn.b2b168.com