agv用减速机 菏泽AGV小车从动轮
发货地址:上海市青浦区
产品数量:10000.00个
价格:面议
功率200-1500W
负载0-10T
定制可以非标定制
电压直流48V或者24V
速度任意设置
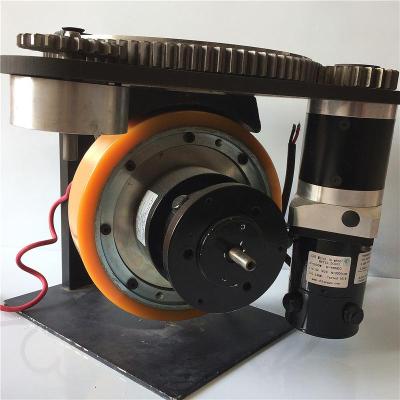
双舵轮AGV小车
优点:通过调整两个舵轮的角度及速度,可以使小车在不转动车头的情况下实现变道,转向等动作:甚至可以实现沿任意点为半径的转弯运动,有很强的灵活性。
缺点:两套舵轮增加了成木:而且AGV在进行机动时经常需要两个舵轮进行差动,这为对电机和控制精度要求较高,进一步增加了开发难度和成本。
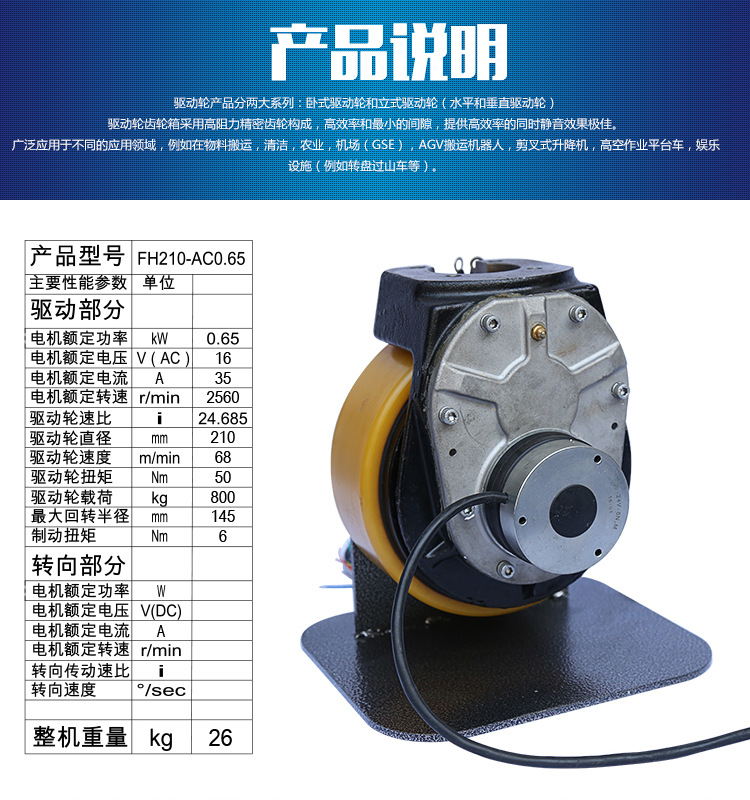
产品说明:
驱动轮轮径:150mm;
安装高度:190mm;
驱动轮行走电机:48V/200-400W;
转向电机:48V/50W-70W;
行走和转向配备编码器;
选配电子限位、机械限位;
单轮额定负载:500KG;
适用1T车型(双舵轮机构)。

麦克纳姆轮型
麦克纳姆轮设计新颖,这种移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。简单来说,就是在轮毂上安装斜向辊子,通过协同运动以实现移动或旋转。麦克纳姆轮的优点是具有10吨以上的载重能力,灵活性高,可以实现360°回转功能和万向横移,更适合在高精度要求及有限空间内的运动。缺点是成本相对较高,结构形式相对复杂,对控制、制造、地面等的要求较高。
适用AGV类型:重载型移动平台、户外移动机器人
适用场景:飞机、高铁等生产制造场景、户外机器人运输场景。
不同的转向驱动类型对应着不同场景下的应用需求,需要根据环境、负载等因素进行综合评估选定。根据应用场景的环境需要,选用合适的转向驱动方式,只有这样才能保证不同作业场景下AGV运行的可靠性、稳定性和性。

1.电磁感应引导 利用低频引导电缆形成的电磁场及电磁传感装置引导无人搬运车的运行。
2.激光引导 利用激光扫描器识别设置在其活动范围内的若干个定位标志来确定其坐标位置,从而引导AGV运行。
3.磁铁--陀螺引导 利用特制磁性位置传感器检测安装在地面上的小磁铁,再利用陀螺仪技术连续控制无人搬运车的运行方向。
http://a2794852653.cn.b2b168.com